Micro:bit Line Follower Robot “Alfa-2a”
Line Follower Robot “Alfa-2a”.
Materialer til denne Line Follower Robot “Alfa-2a” (excl. Motor Driver Board og BBC micro:bit startsæt).
Projektsættet indeholder:
- Et chassis med huller til den lille kasse, hvor batteriboksen skal være, huller til fastgørelse af motorer, holder til montering af to IR tracker sensorer m.m.
- To DC motorer med hjul
- En batteriboks til fire AA batterier med on/off og ledninger til Motor Driver Board
- En holder til batteriboksen med kuglehjul
- 6 ledninger (m/f) til af forbinde IR tracker sensorerne med Motor Driver Board
Køb projektsæt til Line Follower Robot “Alfa-2a”.
Samlevejledning
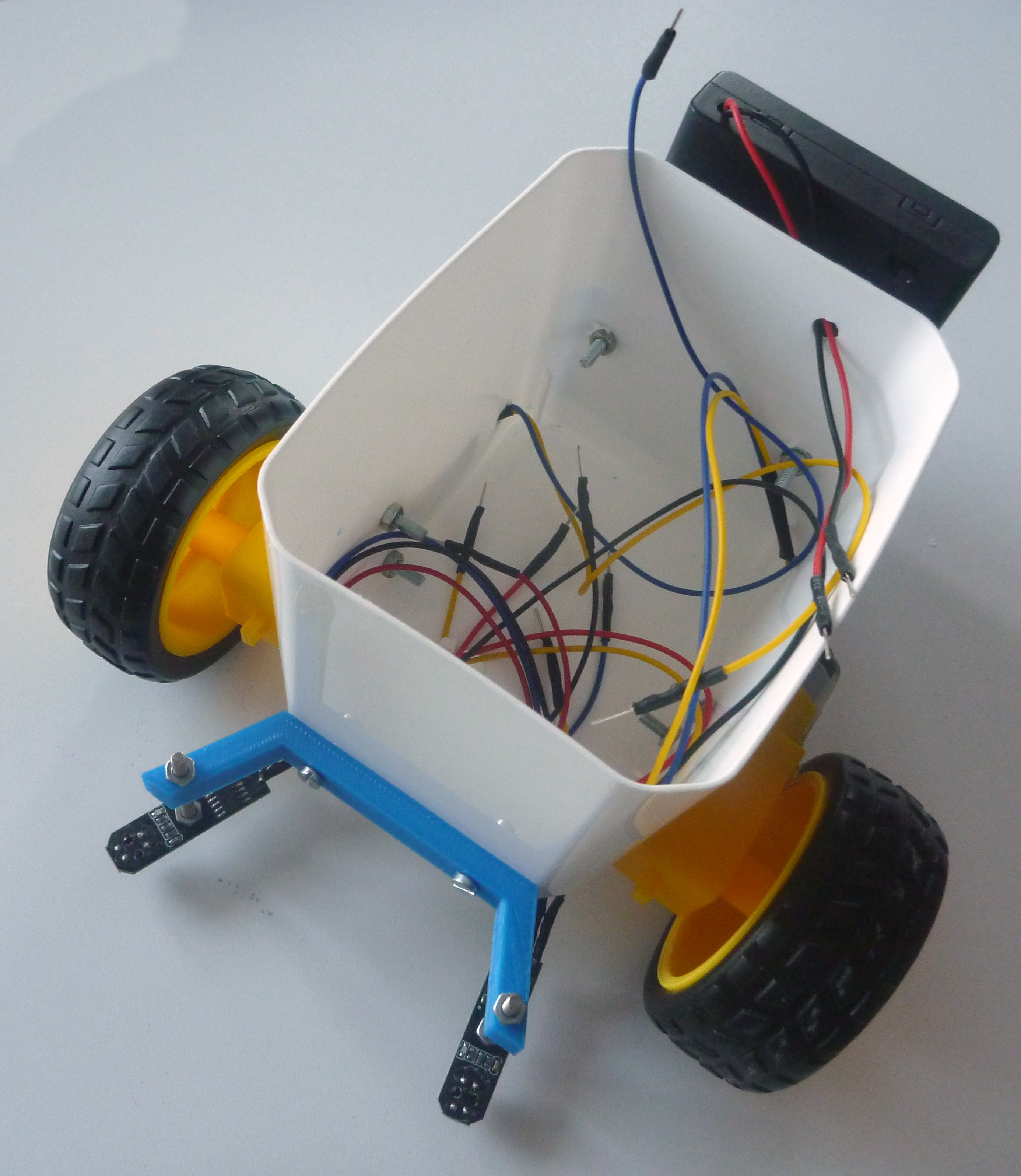
Kassen til batteriboksen sættes på chassiset.

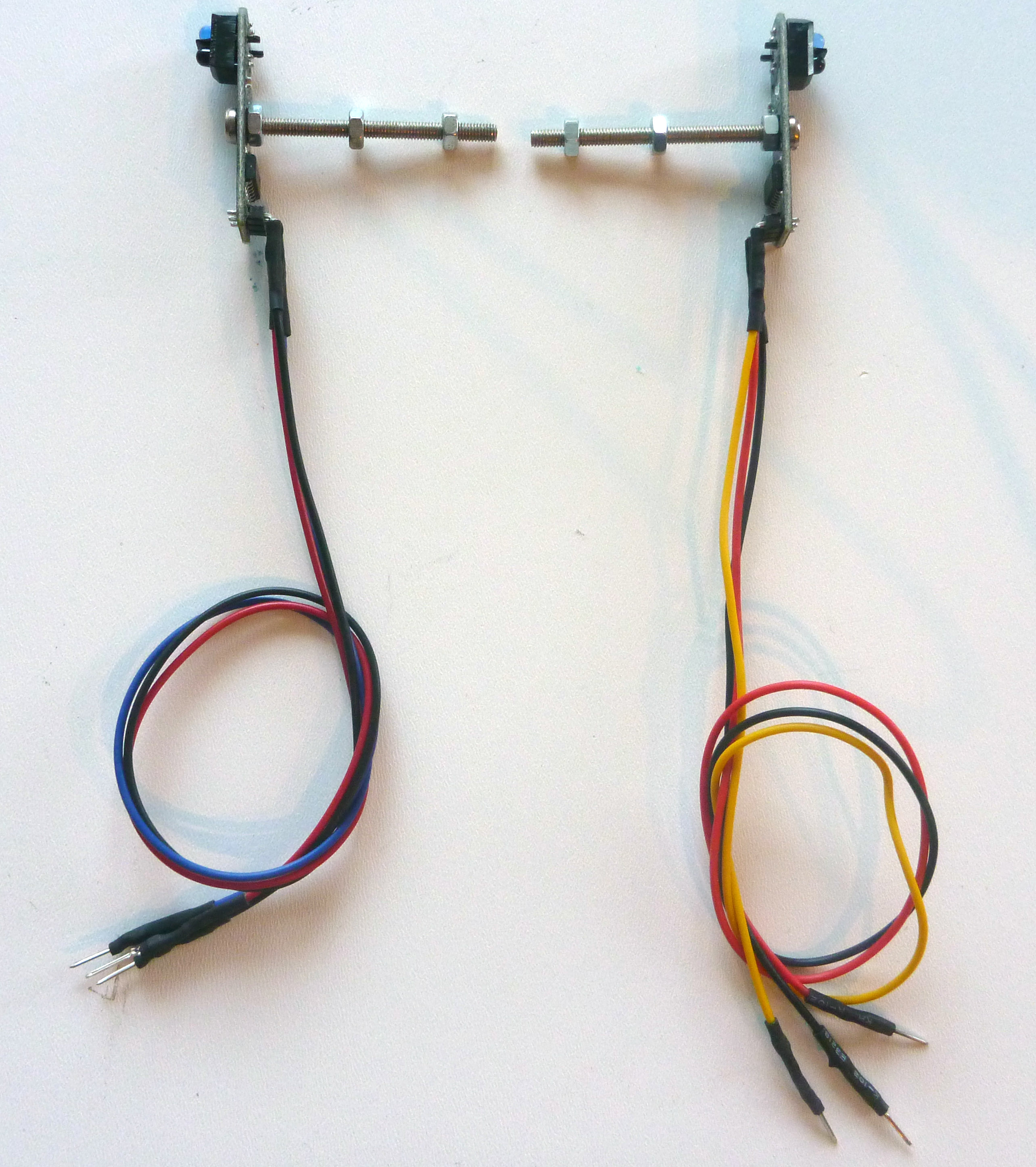
Kuglehjul og ophæng til IR tracker sensorer sættes på chassiset.

De to DC gear motorer sættes på chassiset.
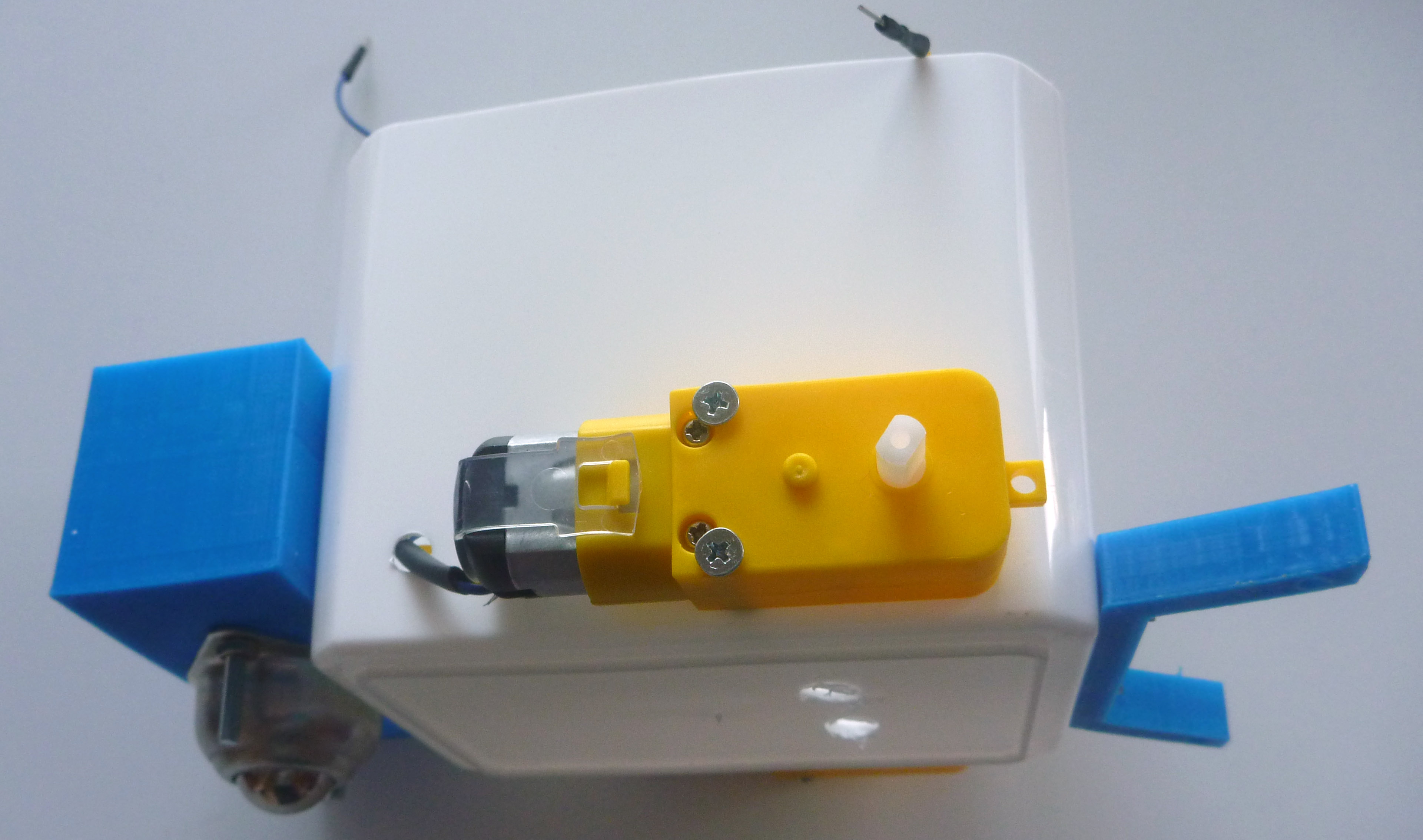
De to IR tracker sensorer sættes fast.
Hjulene sættes på motorerne og batteriboksen anbringes i holderen. Afstanden mellem en IR tracker sensor og bordfladen skal være mellem 2-5 mm.
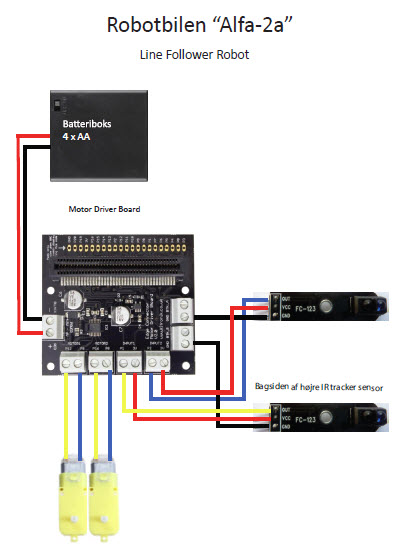
Komponentplacering:
Programmet:
Download denne zip-fil – microbit-Motor-Driver-Line-Follower.zip
Den udpakkede zip-fil indeholder programmet microbit-Motor-Driver-Line-Follower.hex
Denne fil skal downloades til din micro:bit.
Teste Line Follower robot:
Inden du prøvekører din Line follower robot på en bordplade med en sort bane, kan du teste om robotten opfører sig rigtigt. Hold en finger fx under den højre IR tracker sensor, så den lille lysdiode lyser rødt. Hvis den gør det skal robottens højre hjul rotere fremad og det venstre hjul rotere modsat. Hvis du holder en finger under den venstre IR tracker sensor robottens venstre hjul rotere fremad og det højre hjul rotere modsat. Hvis ingen af de to IR tracker sensor er aktiveret skal begge hjul stå stille.
Hvis begge de to IR tracker sensor er aktiveret skal begge hjul rotere fremad.